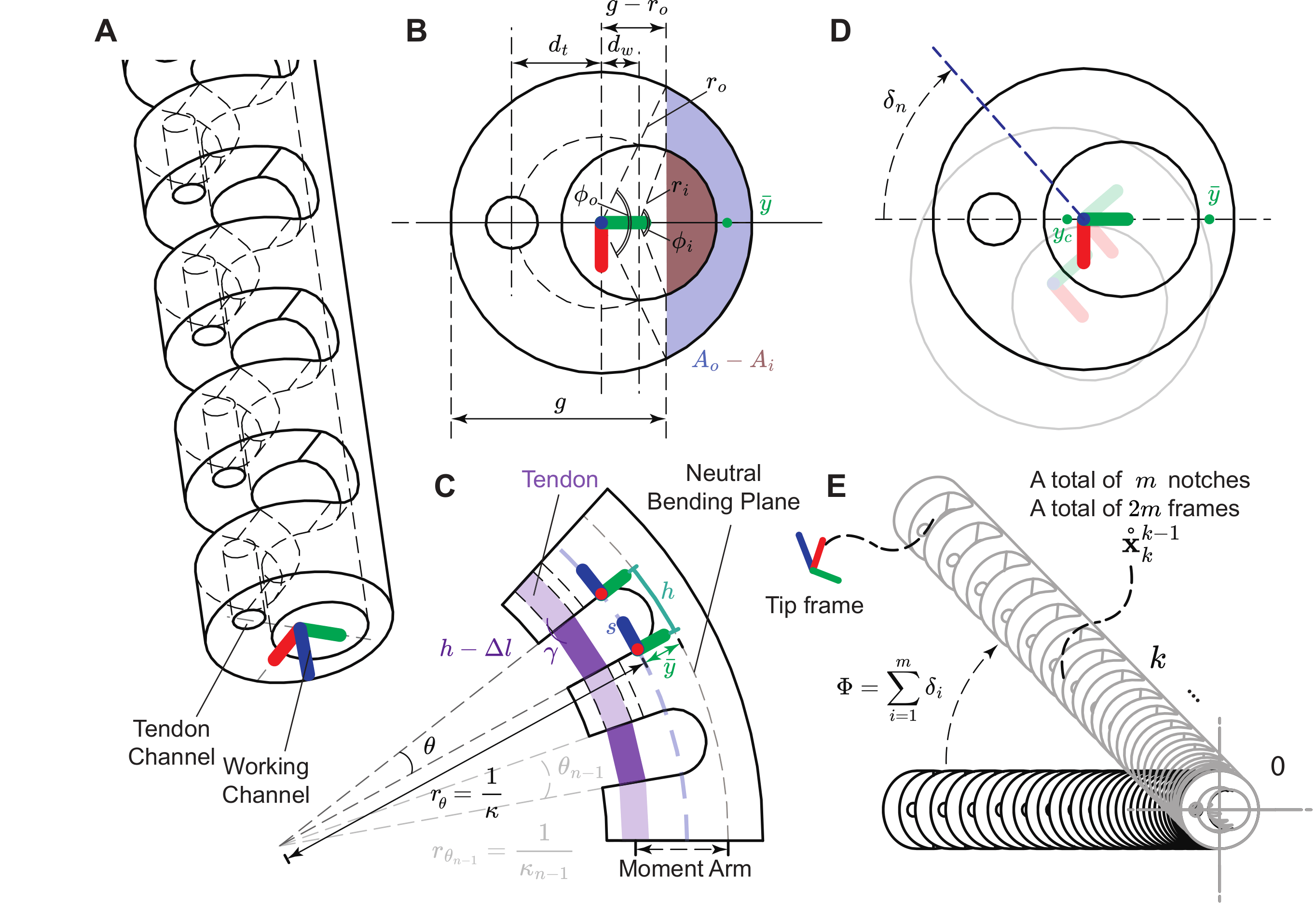
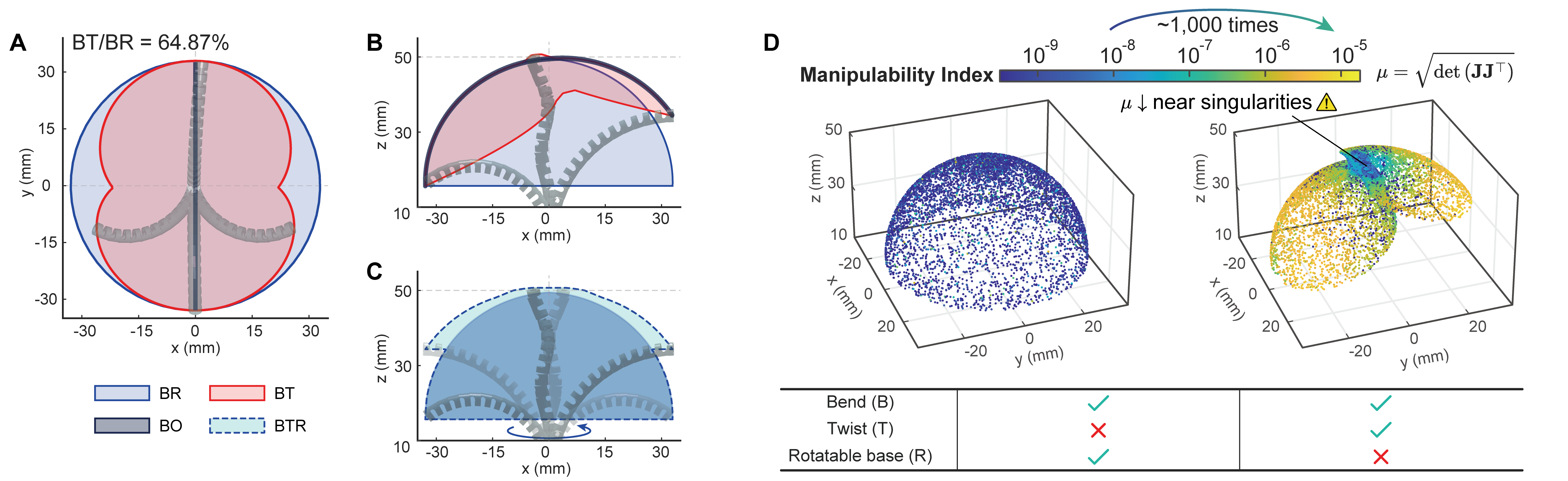
A major limitation of tendon-driven continuum robots lies in their reliance on multiple tendons for achieving complex 3D motion, hindering miniaturization and manipulability.
Push-Pull-Twist
Single Twistable Tendon-Driven Continuum Robots
Nature Communications (2026)
Jiewen Lai1,#, Yanjun Liu1,#, Tian-Ao Ren2, Yan Ma1, Tao Zhang1, Jeremy Teoh3, Mark R. Cutkosky2, Hongliang Ren1,*
1EE, CUHK
2ME, Stanford
3CUHK Medicine
#Equal contribution
*Corresponding author